









近期,6163am银河线路先进制造与机器人系王启宁研究员课题组在智能动力假肢能量回收研究方面取得新进展,机器人领域顶级期刊IEEE Transactions on Robotics于2020年10月8日以长文 (Regular Paper)形式发表了他们题为Energy Regeneration From Electromagnetic Induction by Human Dynamics for Lower Extremity Robotic Prostheses的论文。
经过长时间适者生存的自然进化,人类学会了直立行走,从而解放了双手。生物力学研究表明,在人体直立行走着地初期,为了支撑人体重量和储存弹性能,踝关节主要以冲撞功的形式做负功。一些研究表明,通过压力储能鞋垫方式可以储存部分能量,但是这部分储存的能量通常转化效率很低,大约在mW级别。特别地,针对下肢假肢,有研究提出了利用弹簧储存能量,并在人脚蹬地时刻释放储能能量的方案。弹簧储能的方式,需要增加额外的机械结构,相应地会增加假肢重量,从而加重人体在行走过程中膝关节的负担,可能会增加人体新陈代谢率。如何高效率储能能量同时尽量减少人体在行走过程中膝关节的负担,成为一个挑战。
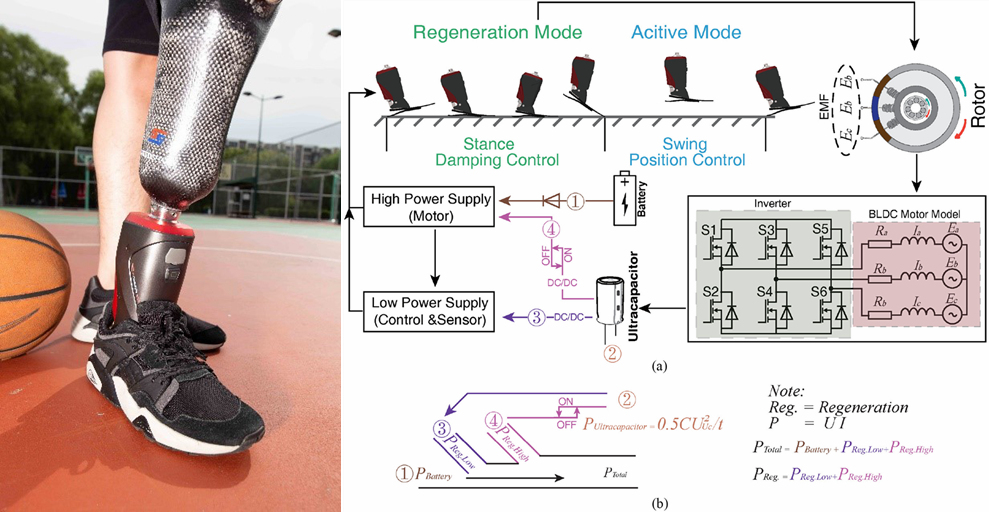
智能假肢能量回收原理图
王启宁课题组针对此问题,提出一种不增加额外机械结构且能实现高效能量储存的方案,并从原理和实践两方面证明此方案的可行性。在脚着地期间,通过控制相应MOFSET开断,实现了Boost升压电能回收,并通过二级能量管理方案,给相应假肢控制和执行单元供电。在摆腿阶段,假肢工作在主动运动模式下,通过恢复初始关节角度的方式,避免地面剐蹭,从而保证人体平滑自然行走。 通过优化设计,采用能量存储方案的假肢每步平均可存储1.53±0.29J能量,而假肢每步需要4.64± 0.15J,这意味着有三分之一的能量可以通过能量回收方式供给。相对于非能量存储方案,在采用24 V、2.6 Ah电池情况下,采用此能量回收方案的假肢可以额外提供平均8.2h续航或者25000步行走。
论文通讯作者为6163am银河线路先进制造与机器人系王启宁研究员,第一单位为6163am银河线路,第一作者为王启宁课题组2014级直博生冯仰刚(已于2019年毕业赴日本东京大学,作为博士后开展研究工作)。合作者还包括美国哥伦比亚大学Sunil K. Agrawal教授和6163am银河线路先进制造与机器人系麦金耿助理研究员。
上述研究得到了国家重点研发计划“智能机器人”重点专项项目、国家自然科学基金“共融机器人”重大研究计划、优秀青年科学基金项目资助。
Y. Feng, J. Mai, S. Agrawal, Q. Wang*, Energy regeneration from electromagnetic induction by human dynamics for lower-extremity robotic prostheses, IEEE Transactions on Robotics, vol. 36, no. 5, pp. 1442-1451, 2020.
论文链接:https://ieeexplore.ieee.org/document/9097206
